
Roma – Nel corso di questi ultimi due anni sono state spese molte parole per descrivere una tecnologia, la RFID, che molti definiscono una “rivoluzione”.
Questa serie di articoli nasce per fare luce in questo ambito sempre più caotico e, partendo da un’analisi storica che ci permetta di far chiarezza sulle reali possibilità di applicazione nell’immediato e nel futuro dell’RFID, cercare di fornire quella serie di concetti e notizie necessari a comprendere i meccanismi intrinseci (o di funzionamento) ed estrinseci (o di applicazione) della tecnologia, superando i luoghi comuni e mettendo tutti (operatori del settore, grandi aziende, comuni cittadini) in grado di affrontare questa “evoluzione” senza allarmismi.
Acronimo RFID
Iniziamo dalla definizione stessa dell’acronimo RFID: “Radio Frequency IDentification”, cioè Identificazione a Radiofrequenza. Lo stesso acronimo ci permette di dare una direzione alla stessa tecnologia (precisandola e limitandola):
a) è una tecnologia che permette l’identificazione (si intende per identificazione il riconoscimento univoco di un oggetto);
b) è una tecnologia che sfrutta la radiofrequenza (di cui si parlerà in seguito).
Da queste precisazioni è possibile già dare limiti e corpo a questa tecnologia, perché lo scopo primario è l’identificazione (certa di un oggetto) e lo scopo secondario è lo sfruttamento di un sistema wireless a radiofrequenza.
Storia
Questa tecnologia è nata durante la seconda guerra mondiale in concomitanza con i primi radar (radio detecting and ranging, rilevamento radio e misurazione di distanze). Questi non erano sofisticati e tecnologici come i moderni radar, ma anzi erano abbastanza artigianali. In pratica erano costituiti da:
 – un’antenna di trasmissione fortemente direzionale (di forma paraboloide) che emetteva una serie di impulsi radio,
– un’antenna di trasmissione fortemente direzionale (di forma paraboloide) che emetteva una serie di impulsi radio,
– un impianto di ricezione (che sfrutta la stessa antenna) montato su un piano rotante,
– un sistema di amplificazione,
– un primitivo schermo.
Il principio di funzionamento del radar consiste nell’inviare verso l’oggetto cercato radioonde generalmente modulate a impulsi e nel ricevere le onde riflesse dall’oggetto medesimo (echi radar). Calcolando il tempo di eco, ossia il rimbalzo dell’impulso sulla carlinga dell’aereo, e conoscendo la posizione istantanea della rotazione dell’antenna ricevente, il sistema di amplificazione permetteva la visualizzazione di un punto sullo schermo, cioè dell’aereo.
 Il ministero della difesa britannico non ritenne completamente soddisfacenti i primi sistemi radar, in quanto non avrebbero dovuto solo avvistare gli aerei nemici, ma anche identificare gli amici dai nemici, così da ottenere la situazione in tempo reale delle battaglie aeree. La difesa britannica quindi ordinò la progettazione di un sistema IFF – Identification Friend or Foe (Identificazione amico o nemico). Gli ingegneri decisero allora di implementare sugli aviogetti inglesi (o alleati in seguito) una scatola contenente una ricetrasmittente, denominata successivamente “transponder”, che all’atto dell’illuminazione radar (vale a dire, quando il fascio di radioonde colpiva l’aereo) rispondesse sulla stessa frequenza istantaneamente con un “bip” che amplificato permise nel radar stesso l’identificazione degli aviogetti amici dai nemici.
Il ministero della difesa britannico non ritenne completamente soddisfacenti i primi sistemi radar, in quanto non avrebbero dovuto solo avvistare gli aerei nemici, ma anche identificare gli amici dai nemici, così da ottenere la situazione in tempo reale delle battaglie aeree. La difesa britannica quindi ordinò la progettazione di un sistema IFF – Identification Friend or Foe (Identificazione amico o nemico). Gli ingegneri decisero allora di implementare sugli aviogetti inglesi (o alleati in seguito) una scatola contenente una ricetrasmittente, denominata successivamente “transponder”, che all’atto dell’illuminazione radar (vale a dire, quando il fascio di radioonde colpiva l’aereo) rispondesse sulla stessa frequenza istantaneamente con un “bip” che amplificato permise nel radar stesso l’identificazione degli aviogetti amici dai nemici.
 Successivamente, con l’evoluzione tecnologica, questi sistemi sono divenuti sempre più precisi. L’evoluzione successiva infatti fu non solo l’identificazione IFF ma l’identificazione univoca dell’aviogetto mediante un ID assegnato. Questo fu possibile modulando l’emissione del transponder (ecco i primi esperimenti di onde radio FM) a bordo dell’aereo, che non inviava più un semplice “bip”, ma una serie opportunamente codificata: ciò permise di “numerare” gli aviogetti e conoscerne così la posizione univoca
Successivamente, con l’evoluzione tecnologica, questi sistemi sono divenuti sempre più precisi. L’evoluzione successiva infatti fu non solo l’identificazione IFF ma l’identificazione univoca dell’aviogetto mediante un ID assegnato. Questo fu possibile modulando l’emissione del transponder (ecco i primi esperimenti di onde radio FM) a bordo dell’aereo, che non inviava più un semplice “bip”, ma una serie opportunamente codificata: ciò permise di “numerare” gli aviogetti e conoscerne così la posizione univoca
Fino agli inizi degli anni ’90 i veri e propri transponder furono utilizzati esclusivamente in campo militare e civile per l’identificazione di navi ed aerei. Successivamente, con l’avvento delle nuove tecniche di gestione magazzino derivate direttamente dalle catene di produzione giapponesi (ad esempio, la gestione magazzino secondo il modello JIT, just in time, che modula la produzione sulla base della richiesta), si resero necessari strumenti di natura informatica sempre più complessi, che permettessero un’automazione spinta ed una localizzazione precisa delle merci incrociata con le apparecchiature automatizzate in movimento.
 Le prime soluzioni degli anni ’80, assai poco eleganti, prevedevano l’uso di codici visuali (ad esempio, i primi codici a barre) che però mostrarono subito i loro limiti: distanze di lettura inferiori ai 5 cm, impossibilità di letture in ambienti con polveri sospese, necessità di pulizia delle apparecchiature continua. Avevano un solo pregio: i bassi costi. Queste soluzioni si evolsero poi fino ai codici a 13 cifre che troviamo normalmente sui prodotti. Questa soluzione però non si legava molto bene all’identificazione o localizzazione di apparecchiature in movimento (ad esempio, i muletti automatici): per risolvere questo problema, ai primi “robot” furono applicati dei transponder a potenza ridotta (con un limite di lettura di una decina di metri e non centinaia di chilometri), inoltre per ridurre i costi fu estrapolata la funzionalità di identificazione da quella del radar, identificando quindi nel raggio d’azione dell’antenna cosa c’era, senza individuarne la posizione.
Le prime soluzioni degli anni ’80, assai poco eleganti, prevedevano l’uso di codici visuali (ad esempio, i primi codici a barre) che però mostrarono subito i loro limiti: distanze di lettura inferiori ai 5 cm, impossibilità di letture in ambienti con polveri sospese, necessità di pulizia delle apparecchiature continua. Avevano un solo pregio: i bassi costi. Queste soluzioni si evolsero poi fino ai codici a 13 cifre che troviamo normalmente sui prodotti. Questa soluzione però non si legava molto bene all’identificazione o localizzazione di apparecchiature in movimento (ad esempio, i muletti automatici): per risolvere questo problema, ai primi “robot” furono applicati dei transponder a potenza ridotta (con un limite di lettura di una decina di metri e non centinaia di chilometri), inoltre per ridurre i costi fu estrapolata la funzionalità di identificazione da quella del radar, identificando quindi nel raggio d’azione dell’antenna cosa c’era, senza individuarne la posizione.
Alla riduzione delle potenze e delle distanze aumenta enormemente la difficoltà nella progettazione di un sistema radar, poiché le onde radio si propagano alla velocità della luce, e l’eco di ritorno è così veloce da non poter essere elaborato. Così nacque il primo sistema di identificazione a radiofrequenza, che permetteva di identificare la posizione (presunta) di un oggetto vicino all’antenna, quindi la possibilità di gestire i movimenti dei muletti in un magazzino automatizzato. Dato che la provenienza di questa tecnologia era prevalentemente di origine aeronautica, ed in aeronautica tutto è normalizzato, all’inizio furono utilizzati gli stessi standard aeronautici, poi convertiti in standard ISO sulla base dell’espansione della tecnologia. Di seguito vediamo come sono mutati i sistemi in circa 50 anni.
I componenti principali sono ora costituti da:
a) antenna ricetrasmittente (ridotte le potenze e le dimensioni, eliminata la rotazione e l’identificazione della posizione);
b) apparecchi di visualizzazione (passaggio da schermi con identificazione del punto a comunicazione dei dati informatici direttamente a un computer);
c) transponder (ridotte le dimensioni e limitata la potenza, alimentazione a batterie).
È importante sottolineare la differenza tra i transponder aeronautici ed i transponder RFID: i primi sono delle complete apparecchiature di ricetrasmissione (che hanno anche un costo molto alto e sono alimentati dall’aereo stesso), i secondi sono invece costituiti essenzialmente da:
– un’antenna ricetrasmittente;
– una batteria;
– un microchip.
 Questa tipologia di transponder è stata denominata “attiva” in quanto è dotata di batterie ed è tutt’ora utilizzata nell’industria (persino in autostrada con il telepass). Il primo utilizzo sperimentale di questa tecnologia fu fatto negli anni ’70 con gli animali, quando l’Università di Chicago definì un protocollo per l’identificazione e l’invio di dati come la temperatura. Qui si definirono chiaramente le caratteristiche dell’RFID moderno, vale a dire:
Questa tipologia di transponder è stata denominata “attiva” in quanto è dotata di batterie ed è tutt’ora utilizzata nell’industria (persino in autostrada con il telepass). Il primo utilizzo sperimentale di questa tecnologia fu fatto negli anni ’70 con gli animali, quando l’Università di Chicago definì un protocollo per l’identificazione e l’invio di dati come la temperatura. Qui si definirono chiaramente le caratteristiche dell’RFID moderno, vale a dire:
– l’identificazione wireless;
– la trasmissione di dati wireless.
 Il sistema così ideato aveva però forti limiti: non era infatti possibile identificare la posizione di un transponder avendone ridotto le dimensioni e la potenza. Spesso due transponder operanti nello stesso campo radio si disturbavano, endendo impossibile la lettura dei reciproci identificativi. Questo problema viene detto “effetto collisione” e si verifica quando due segnali con la stessa frequenza si accavallano. Ad esempio, si pensi a più persone che parlano nella stessa stanza contemporaneamente: il tono di voce rappresenta la frequenza. Se tutti hanno lo stesso tono di voce, le comunicazioni sono impossibili.
Il sistema così ideato aveva però forti limiti: non era infatti possibile identificare la posizione di un transponder avendone ridotto le dimensioni e la potenza. Spesso due transponder operanti nello stesso campo radio si disturbavano, endendo impossibile la lettura dei reciproci identificativi. Questo problema viene detto “effetto collisione” e si verifica quando due segnali con la stessa frequenza si accavallano. Ad esempio, si pensi a più persone che parlano nella stessa stanza contemporaneamente: il tono di voce rappresenta la frequenza. Se tutti hanno lo stesso tono di voce, le comunicazioni sono impossibili.
Per risolvere questo problema furono ideati degli algoritmi anticollisione che permisero la comunicazione alternata di due o più transponder senza conflitti. Era inoltre necessario identificare in modo certo il campo d’azione dell’antenna emettitrice/ricevente per evitare che due o più antenne si disturbassero a vicenda. La strada per la soluzione a questo problema fu trovata ripercorrendo quella tracciata dai sistemi EAS (Electronic Article Surveillance), una variante dei sistemi RF del 1960, che emettevano un singolo bit (presente o assente, quindi senza identificazione): oltretutto il transponder non doveva essere alimentato: in pratica la sua presenza “disturbava” il campo radio e veniva quindi individuato. Questi sistemi lavoravano a frequenze più basse delle normali onde radio per i radar, generando campi elettromagnetici tra due estremità di antenne (come ad esmepio avviene nei due pannelli del sistema antitaccheggio del supermercato) e quindi agendo in spazi ben delimitati e certi.
 Lo studio dei sistemi EAS aveva però dato anche lo slancio verso la ricerca di un sistema RFID che non necessitasse di un sistema di alimentazione sul transponder, rendendolo così più piccolo, economico e di maggior durata, con una vita non più legata all’autonomia della batteria: si pensò quindi, abbassando le frequenze, di sfruttare i principi dell’elettromagnetismo, gli stessi che fanno funzionare i trasformatori. Si parla in pratica dell’esperimento di Marconi: la “condensazione di energia elettrica a distanza mediante un’onda radio” (ma vedremo meglio in seguito distinguendo le frequenze HF – UHF) per alimentare i transponder, esperimento che riuscì benissimo, grazie anche alle miniaturizzazioni, all’aumento dell’efficienza dei microchip EEPROM e all’inserimento di un condensatore che rende stabile la carica il tempo sufficiente all’invio dei dati. Si ottennero così i primi transponder “passivi”, che d’ora in poi chiameremo TAG.
Lo studio dei sistemi EAS aveva però dato anche lo slancio verso la ricerca di un sistema RFID che non necessitasse di un sistema di alimentazione sul transponder, rendendolo così più piccolo, economico e di maggior durata, con una vita non più legata all’autonomia della batteria: si pensò quindi, abbassando le frequenze, di sfruttare i principi dell’elettromagnetismo, gli stessi che fanno funzionare i trasformatori. Si parla in pratica dell’esperimento di Marconi: la “condensazione di energia elettrica a distanza mediante un’onda radio” (ma vedremo meglio in seguito distinguendo le frequenze HF – UHF) per alimentare i transponder, esperimento che riuscì benissimo, grazie anche alle miniaturizzazioni, all’aumento dell’efficienza dei microchip EEPROM e all’inserimento di un condensatore che rende stabile la carica il tempo sufficiente all’invio dei dati. Si ottennero così i primi transponder “passivi”, che d’ora in poi chiameremo TAG.
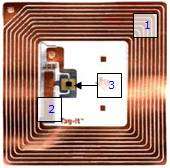
Vediamo la costituzione di un TAG passivo:
– antenna, costruita secondo specifici canoni per “catturare l’energia” (v. figura sopra, sezione 1)
– condensatore (2)
– microchip (3)
Da questo momento i campi di ricerca sulla tecnologia RFID si sono sdoppiati in:
– tecnologia RFID attiva a campo non delimitato;
– tecnologia RFID passiva a campo delimitato.
La tecnologia passiva ha anche permesso di semplificare alcuni processi come l’algoritmo anticollisione: dato che i TAG sono alimentati dal campo elettromagnetico, lo stesso non riesce ad alimentarne più di 30/40, quindi l’algoritmo può essere ottimizzato per queste situazioni; per i TAG attivi, invece, possono arrivare fino oltre i cento TAG contemporanei nel campo elettromagnetico.
Vediamo quindi le differenze tra la tecnologia “attiva” e “passiva”.
Tecnologia attiva:
a) antenna piccola, multidirezionale
b) frequenze nell’ordine del GHz (tra i 900 MHz ed i 5,8 GHz);
c) distanze di lettura nell’ordine delle decine di metri;
d) transponder alimentati;
e) algoritmo anticollisione avanzato.
Tecnologia passiva:
a) antenne monodirezionali di discrete dimensioni;
b) frequenze basse (Hz per i TAG ad induzione o HF, MHz per i TAG elettrici o UHF; differenza di cui si parlerà in maniera più approfondita in seguito);
c) distanze variabili tra 1 cm e 20 metri;
d) transponder non alimentati;
e) algoritmo anticollisione semplificato (massimo 30-40 TAG contemporanei)
Per il momento è tutto. Vi do appuntamento alla prossima settimana con un articolo in cui approfondiremo la conoscenza della tecnologia RFID.
Ti potrebbe interessare


17 set 2004