
Ferve la corsa alla Luna, i partecipanti sgomitano per raggiungere il suolo del satellite come se fosse davvero la prima volta. Ci prova la Cina , ci provano gli States , ci prova l’Europa. Sognano la Luna le persone ordinarie, vogliono conquistarla due centri di ricerca universitari pisani. Con un robot.
 A guardare alla Luna sono gli studenti e i ricercatori che fanno capo al Centro Centro di Ricerca in Robotica e Bioingegneria Piaggio dell’Università di Pisa e gli studenti e i ricercatori della Scuola Superiore Sant’Anna : fanno parte di due degli otto team finalisti dell’ ESA Lunar Robotics Challenge , una competizione promossa dall’agenzia spaziale europea per raccogliere idee e proposte per l’esplorazione e l’analisi del suolo lunare.
A guardare alla Luna sono gli studenti e i ricercatori che fanno capo al Centro Centro di Ricerca in Robotica e Bioingegneria Piaggio dell’Università di Pisa e gli studenti e i ricercatori della Scuola Superiore Sant’Anna : fanno parte di due degli otto team finalisti dell’ ESA Lunar Robotics Challenge , una competizione promossa dall’agenzia spaziale europea per raccogliere idee e proposte per l’esplorazione e l’analisi del suolo lunare.
La competizione ha avuto inizio a marzo: il bando di ESA, l’entusiasmo degli studenti, le idee da scremare. Adriano Fagiolini, team leader del Laboratorio Piaggio, racconta a Punto Informatico che i quattordici membri della sua squadra, il Pisa Lunatics Team , hanno dovuto affrontare “un lavoro quotidiano e un impegno costante”, Roberto Farolfi, della Scuola Superiore Sant’Anna, ricorda di aver perso “tante notti di sonno” insieme ai compagni di squadra a causa dei tempi incredibilmente stretti forniti da ESA. Lungaggini burocratiche e contrattempi in seno a ESA hanno fatto sì che i ragazzi potessero contare su poche settimane per formulare un’idea abbastanza brillante da poter essere approvata dall’agenzia spaziale, e che abbiano a disposizione il tempo che li separa da ottobre per assemblare il robot che hanno progettato: la prova sul campo si svolgerà a Tenerife prima che le piogge inizino a tempestare le Canarie.
L’ESA non ha chiesto poco ai ragazzi. Il robot progettato dalle università europee dovrà essere leggero e maneggevole , dovrà pesare meno di 100 kg e, teleguidato, dovrà affondare e riemergere da un cratere lunare simulato presso l’isola. Dopo aver percorso una pendenza di 40 gradi su terreno sabbioso , il robot dovrà poter raccogliere campioni di materiale , affrontare la ripida salita, rintracciare il lander che l’ha fatto atterrare sulla Luna e sapervi depositare con destrezza i campioni di materiale raccolto. Il tutto dovrà svolgersi al buio di un cratere profondo 15 metri localizzato nel polo sud lunare, in assenza di atmosfera ed esposti alle radiazioni, circondati da una sabbia estremamente abrasiva dalla quale i meccanismi dovranno essere protetti.
 Sono completamente differenti gli approcci scelti dalle due università italiane in gara: si muovono in maniera diversa, raccolgono il materiale in maniera diversa, comunicano con il manovratore in maniera diversa.
Sono completamente differenti gli approcci scelti dalle due università italiane in gara: si muovono in maniera diversa, raccolgono il materiale in maniera diversa, comunicano con il manovratore in maniera diversa.
Il robot dell’Università di Pisa fa affidamento su quattro ruote in alluminio e su un meccanismo di raccolta che, spiega Adriano, ricorda una canna da pesca : ad un braccio rigido è affiancato un cavo estensibile che culmina in una pinza per il recupero della sabbia colorata che a Tenerife contraddistinguerà l’obiettivo. Con questa strumentazione sarà possibile sopperire alle difficoltà che il robot potrebbe affrontare nella discesa scoscesa del cratere. La squadra del laboratorio Piaggio farà affidamento sulla visione tridimensionale offerta da stereocamere e potrebbe implementare anche un laser per migliorare la visione per quanto riguarda la profondità.
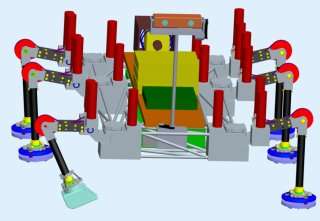 Il pESApod (la squadra della Scuola superiore sant’Anna ha battezzato il proprio robot con un complesso gioco linguistico tra hexapod , l’acronimo che contraddistingue l’agenzia spaziale europea e la pronuncia che richiama alla mente la città di provenienza della squadra), sarà invece un robot a sei zampe : “Riteniamo che sia l’unica soluzione possibile per garantire la necessaria stabilità – spiega Roberto a Punto Informatico – i cingoli o le ruote potrebbero non farcela ad affrontare la pendenza”. Solo due delle squadre in gara si affidano a robot a zampe: sarà quadrupede quello dell’Università di Zurigo, sarà esapode quello dei ragazzi pisani. Altra peculiarità che vanta la squadra della Scuola Superiore Sant’Anna è il meccanismo che contraddistingue una delle zampe anteriori del pESApod: agisce come una benna per scavare, raccogliere e proteggere il materiale prima che venga depositato nell’alloggiamento del lander. Roberto racconta anche che la comunicazione con l’operatore umano sarà garantita da una rete wireless multihop: le altre squadre si affideranno ad un solo ripetitore mentre la loro si comporterà “come Pollicino”. Il robot lascerà sul percorso dei ripetitori, in modo che il segnale sia più stabile, in modo che se uno dei nodi della rete dovesse smettere di funzionare sia possibile riconfigurare la rete per non interrompere la comunicazione. Una stereocamera e due telecamere di prossimità permetteranno una manipolazione precisa del materiale, a fendere il buio del cratere saranno dei potenti fari led, che garantiscano il risparmio energetico necessario a ridurre l’impatto del peso delle batterie: per non sovraccaricare le zampe il loro robot peserà meno di 30 kg.
Il pESApod (la squadra della Scuola superiore sant’Anna ha battezzato il proprio robot con un complesso gioco linguistico tra hexapod , l’acronimo che contraddistingue l’agenzia spaziale europea e la pronuncia che richiama alla mente la città di provenienza della squadra), sarà invece un robot a sei zampe : “Riteniamo che sia l’unica soluzione possibile per garantire la necessaria stabilità – spiega Roberto a Punto Informatico – i cingoli o le ruote potrebbero non farcela ad affrontare la pendenza”. Solo due delle squadre in gara si affidano a robot a zampe: sarà quadrupede quello dell’Università di Zurigo, sarà esapode quello dei ragazzi pisani. Altra peculiarità che vanta la squadra della Scuola Superiore Sant’Anna è il meccanismo che contraddistingue una delle zampe anteriori del pESApod: agisce come una benna per scavare, raccogliere e proteggere il materiale prima che venga depositato nell’alloggiamento del lander. Roberto racconta anche che la comunicazione con l’operatore umano sarà garantita da una rete wireless multihop: le altre squadre si affideranno ad un solo ripetitore mentre la loro si comporterà “come Pollicino”. Il robot lascerà sul percorso dei ripetitori, in modo che il segnale sia più stabile, in modo che se uno dei nodi della rete dovesse smettere di funzionare sia possibile riconfigurare la rete per non interrompere la comunicazione. Una stereocamera e due telecamere di prossimità permetteranno una manipolazione precisa del materiale, a fendere il buio del cratere saranno dei potenti fari led, che garantiscano il risparmio energetico necessario a ridurre l’impatto del peso delle batterie: per non sovraccaricare le zampe il loro robot peserà meno di 30 kg.
I progetti delle due squadre, dagli algoritmi software alle parti meccaniche, sono in fase avanzata: i concorrenti hanno circa tre mesi per affinare i dettagli, recuperare le parti meccaniche e costruire il robot in attesa della sfida di ottobre. ESA ha assicurato alle otto squadre finaliste 43 mila euro. Comunque vada la competizione, spiega Roberto, il robot rimarrà alle università perché possano sfruttarlo come piattaforma per nuovi progetti. L’agenzia spaziale, chiariscono i ragazzi, è probabile che distillerà dalle macchine in competizione le idee migliori per ingegnerizzarle “a livello spaziale”.
“Non possiamo perdere” annuncia combattivo Roberto, ricordando che la Scuola Superiore Sant’Anna da anni rivaleggia con il Laboratorio Piaggio in una sana e onesta competizione. Ma oltre alla positiva tensione agonistica per un derby toscano c’è la voglia di imparare e di mettersi alla prova: “È una bella opportunità – racconta Adriano – ci consentirà di fare esperienza e di confrontarci con un problema affascinante”.
a cura di Gaia Bottà
(fonte immagini: qui )
Ti potrebbe interessare


18 lug 2008